
Üdv.
Szval volna egy 24V 2,5A-s DC motor, amibe bele van építve egy enkóder, ami üzemi fordulatszámon kb. 2kHz frekvenciájú négyszöget ad OC kimeneten.
De nekem persze nem a teljes fordulatszám kell, hanem annak a 90%-a, de az ám pontosan, terheléstől, melegedéstől stb függetlenül. Már gúvad a szemem, annyit gugliztam, és nem találtam egy konyharecept-szerűen utánépíthető kapcsolást sem erre az egyszerű feladatra, pedig biztosan megoldották már sokan sokszor, hiszen rengeteg ilyen motor van mindenféle készülékekben.
Tudtok kipróbált, bevált sémát ajánlani, vagy valami beszerezhető, feladatorientált IC típust mondani? A mikrokontrollereket most hagyjuk, nem akarnók programfejlesztgetésekbe bonyolódni, ha nem muszáj... ennek a gyakorlati megvalósítására vágyok:
Az LM2917N-tel megvalósított dum-dum kapcsolás nem vált be. Túl lassú a frekvencia-feszültség konverzió, és rángatózik, gerjed, oszcillál az egész, ennél valami finomabb dolog kellene...
Szia!
Nem tudom, hol tartasz, de lehet érdemesebb lenne mikrokontrollerre bízni.
Ha már ott az enkóder rajta, akkor meg lehet számolni, hányat fordul 1 másodperc alatt, az eltéréshez tartozó PWM változáshoz pedig be tudod lőni a karakterisztikát (kis eltéréshez kis változás, nagyhoz nagyobb). De ezt a részét meg lehet oldani egy 12 bites számlálóval is. Ha már fixen van tartva a fordulatszám, akkor még hozzá lehet csapni a fázisszinkronizációt. Bár ha tudja tartani a 2000 impulzus +/- 1-et, akkor ha percenként 1 impulzussal csúszik ugyanabban az irányban, akkor 45 percnél még mindig csak 22ms csúszás.
Némi extraként percenként ellenőrizni, hányat fordult addig, és a következő percben rá lehetne korrigálni.
Üdv: Jácint
0
Attól tartok, hogy ebben tényleg neked lesz igazad. Őrült nagyra hízik másképp az elektronika, mert kell fáziskomparátor, időalap, hozzá osztó, összegző műv erősítő, PWM generátor... ez már alsó hangon öt IC... lehet, hogy tényleg egyszerűbb volna egy mikrokontroller. No de ki fogja rá megírni a programot? (Megfizethető áron)
0
Szia !
Azt hiszem nem érted a probléma miben létét.
A filmet levetítve a hang az amelyet "atomstabilan" kell(ene) tartani a sebességét tekintve MM elmondása szerint max. 48 percen át.
A képkockák tempóját van mód úgy korrigálni a vetítés/digitalizálás közben (mert a szemünk/látásunk ezt megengedi) hogy a 48. percben is a szájszinkron ne legyen zavaróan elcsúszva! A "vádlott" :) elmondása szerint ez nem több mint 0,1-0,2 sec.
Ezt a hangsáv sebességtartást kellene 2880 sec alatt 0,2 sec alatt tartani. Ez bőven 0,01% alatt van. Ez csak úgy fog menni ha legalább ennél egy nagyságrenddel pontosabb időalaphoz szinkronizálod a rendszert. Vagy is szükséges a PLL alkalmazása.
Laci
0
Szia!
Hogy a fenébe nem értem. 48 perc alatt 2880*2000, vagyis 5 760 000 fordulatot kell megtennie a motornak. Ha bordásszíjon van, akkor ezt simán lehet tartani. Ha az első percben késik 1ms-et, ami két fordulat, akkor a következő percben ennyivel többet kell rajta forgatni, és a második percben már megint pontos. Ezt viszont csak mikrokontrollerrel, vagy digitálisan felépítve lehet megoldani.
Üdv: Jácint
0
Ez így nagyon jó lenne. több mint 60 tacho impulzus jut 1/25mp-re, szval ha egy mp-n belül van egy-két tacho impulzusnyi lengés, az bőven kva jó, annyit még bőven elvisz a lendkerék a hangfejnél.
0
Szia!
Lehet, hogy a fáziskomparálás elhanyagolható, elég lenne csak a tachoimpulzusokra belőni. Körül kellene néznem, találok-e tachos motort.
Üdv: Jácint
0
A fázis itt nem számít, több mint 60 impulzus esik 1/25 mp-re, és a hangfejnél egy 10 centis lendkereken fut a film, úgyhogy nem olyan könnyű megnyávogtatni. Fix frekvencián kell tartani a gépet, ennyi a feladat. Még az sem nagy tragédia, ha a sebesség nem annyira pontos, a lényeg az, hogy egyenletes legyen.
0
Kerítek egy motort, motor-driverem van, csak PWM kell neki. Szerintem egyszerűbb lesz, mint első ránézésre volt.
Üdv: Jácint
0
Éppenséggel egy ugyanilyen motort tudok kölcsön adni... U/pwm átalakítóm is van készen 556-ból... szóval ha van kedved átvenni ezt a gondot a vállamról, akkor gyerünk át privibe, és alkudjunk meg!
0
Szia !
Nem, továbbra sem vagy tisztában az egész folyamattal. Most nincs időm bepötyögni az egészet. Majd esete felé.
Laci
0
Hali !
Na itt lennék.
A filmen akár a felvételkor akár utólag került rá a hanganyag, egymáshoz képest mechanikusan kötötten helyezkednek el.
A vetítéskor ha változik a filmtovábbítási sebesség legfeljebb nem a megszokott, természetes hangfekvésben halljuk pl. a kistesó hangját de a pontos szájszinkron végig a film teljes hosszában megmarad. Persze ha a filmtovábbítás kisebb nagyobb rövid idejű ingadozást szenved azt meghalljuk mert a fülünk/hallásunk erre érzékeny. Ezt az ingadozást próbálja a hangtengely lendkereke minimalizálni. Ezeken a filmformátumokon még nincs semmi féle időkód mert erre a szokványos vetítéskor nincs, nem volt szükség.
.
Digitalizáláskor a hangsáv az gyakorlatilag real time adatfolyammá válik. A képanyag filmkockánként (8mm-nél 12-18kép/sec, 16mm-nél 24kép/sec) kerül beolvasásra. A film végén a két ismert adat a filmkockák száma és hogy ez milyen időtartamú filmhez tartozik. Természetesen az egyes filmkockák sorrendje az kötött. Semmi (nulla)információ nincs arról hogy az egyes filmkockák a hangsáv mely időpillanatához köthetőek abszolút pontossággal.
A digitalizálás végeredményeként a hang adatfolyamához hozzá kell illeszteni az egyébként teljesen más úton végigmenő és jelfeldolgozási igénnyel bíró képanyagot. A filmen lévő hanganyagról azt tudhatjuk hogy természetesnek ható hangfekvésben levetítve/lejátszva mennyi az össz. játékideje. Semmi többet. Hogy a digitalizálás végén a hang és képanyag az elejétől a végéig és a közbenső időpillanatokban is végig pontos szájszinkronnal rendelkezzen a vetítéskor(digitalizáláskor) abszolút és a filmen belül relatíve is pontos sebességgel szükséges tovvábbítani a filmszalagot. Ugyan is a képkockák utólagos hozzárendeléséhez (hogy megmaradjon a minden idő pillanatbeli szinkronitás) a digitalizált hangsáv játékideje és az azon belüli monotonitása szolgáltatja a referenciát. Példaként teszem azt 30perces hanganyaghoz tartozik 1800x24=43200 képkocka. Ezt a 43200 képkockát kell egyenletes időközönként hozzárendelni a hanganyaghoz.
.
Ha max. 0,1 sec csúszást engedünk meg a kép és a hang között, az 1800 sec-nél kb. 0,005% max. hibát enged meg számunkra. És ezt hangsúlyozom, abszolút értékben is szükséges tartani! Na ezért szükséges a külső, idő avagy frekvencia referenciajel amihez kötjük a szabályzást.
Ahhoz hogy ezt a 0,005% pontosságot tartani lehessen, a referencia jelnek ennél két nagyságrenddel illik pontosabbnak lennie!
.
Ezeket gondoljátok át aztán döntsetek.
Üdv. Laci
0
Szia Laci!
Nem mondod?
Épp ezért tartom fontosabbnak, hogy nem a motor sebességét kell irreális pontossággal szabályozni, hanem arra kell törekedni, hogy adott idő alatt ugyanannyit továbbítson a szalagon. Tehát ha az első másodpercben csak 4,65cm-et sikerült továbbítani rajta, akkor a következő másodpercben az lesz a cél, hogy 4,75cm-t továbbítsak. Így a második másodperc végén pontosan szinkronban leszek, pedig 2%-ot tévedtem mindkét esetben. Mivel bordásszíj és encoder van a rendszeren, így a 10. percben is el tudom dönteni, hogy ott tart-e a hang, ahol a kép, csupán azt kell ellenőriznem, az enkóderről lejött-e már az 1200000 impulzus vagy sem.
Üdv: Jácint
0
Szia Jácint !
Nem mondok semmit csak a megoldandó feladatot vázoltam amit egyébként MM több részletben, de már korábban leírt velem teljesen szinkronban.
Az alkalmazott digitalizálási eljárás során az ilyen olyan ingadozással terhelt, azzal beolvasott képanyagot a "végtermék összeállítása során képkockánként egyenletes időközönként pakolod rá az időtengelyre. Ehhez képest a digitalizált hang időtengelye :) lengedezik ilyen olyan mértékben mint a bíró..... :) Miután a filmről már lekerül a feldolgozás során a két összetevő, az azok közötti merev időbeli kötöttség (ami a filmszalagon egymáshoz képesti fizikai helyét jelenti) már nem létezik. Azt visszaállítani csak a korábban általunk leírt pontosságú eljárással lehetséges. A probléma a két összetevő közötti valami féle szinkron jel teljes hiánya.
Lehetne ugyan ahogy MM említette a hang A/D mintavételezési órajelét a motor mindenkori tacho jeléhez szinkronizálni "jó bő lére eresztett saját hardverrel" az időbeli szinkronitást tető alá hozni de akkor pedig egy másik probléma ütné fel a fejét. Nevezetesen az ingadozó mintavételi órajellel rögzített hangjelet a végfelhasználó stabil órajellel játssza le mely lényegében egy kóválygó hangmagasságú/hangfekvésű hangként hallhatsz.
Ez most nem az a probléma mint a képmagnók mechanikájának több kevesebb hibája által okozott az egyébként kötött időstruktúrájú videojel kivasalása egy TBC-vel hogy studiótechnikailag "konyhakész" legyen.
Laci
0
Nem lenne semmi baj a kapuzott hanggal, hiszen az egy centire eső minták száma azonos és egyenletes volna.
0
Szia Laci!
Értem én a problémát, itt csak egy dolog fix, a szalag hossza. A kívánt sebességtartást csak léptetőmotorral lehetne elérni, vagy vákuumban 33 fokon (kis túlzással). Így marad, hogy korrigáljuk az összeadott hibát mielőtt feltűnne.
Üdv: Jácint
0
És teljesen jó is lenne, mert az, ha van egy pár másodperc periódusú, néhány századmásodperces lengés a hangsebességben, az még bőven az észlelési határon alul volna, és így nem adódik össze a hiba a tekercs végére.
Zseniális vagy.
0
Ki kell próbálni.
Minden érdemi találmány nagyrészt a férfiak lustaságából született.
A "lustaság" pedig ezen túlmenően segíti a kompromisszumkészséget. :)
0
Ebből élek :)
Üdv: Jácint
0
Köszi, nagyon szépen összefoglaltad.
Annyival egészíteném csak ki, hogy fontos, hogyha a hangfelvétel közben a sebesség változik (mondjuk mert melegszik a motor, vagy akármi), akkor sehogy sem jön össze a kép a hanggal. És azt már nem is lehet csak úgy kikorrigálni a hangsáv vagy a képsáv széthúzásával-összetolásával.
Az ideális megoldás a problémára a hangdigitalizáló A/D átalakító órajelét a motor tahójához szinkronizálni volna. De természetesen ez műszakilag nem megoldható egy mai, egy chipbe integrált hangkárya esetében. :-(
0
Szia!
Nem értem, mire alapozod a kijelentésed.
A képkockát a számítógép játssza le, ezt stabilnak vehetjük. A hangszinkron titka, hogy a hangsávot tartalmazó szalag a 48. percben is a 48. percnél járjon. Ha pl 4,7cm/s-al kell járnia a szalagnak, akkor egy sebességszabályzás akármilyen pontos, a hibák össze fognak adódni.
Ahogy telik az orsó, a motor a nagyobb terheléstől lassulni fog, a korrekció időbe telik, ha nem is sokba. De ezek az idők össze fognak adódni, így a film végére már csúszhat a szájszinkron. Ezért írtam azt, hogy sokkal fontosabb, hogy a századik szekundumban 470cm-nél járjon a szalag. Amellett, hogy tartani kell egy állandó sebességet (pl 0,1% pontossággal), arra is kell figyelni, hogy átlagban is meg legyen a sebesség, ezt pedig csak úgy lehet megtenni, ha nem csak a pillanatnyi sebességet tudod, hanem az összesen addig megtett utat is ismerd, és ha kell, korrigálj rá.
A 0,007%-os pontossággal hajtott motor legrosszabb esetben 1cm-t fog téveszteni 48 perc alatt. De a 0,007% pontosságot tartani szerintem lehetetlen analóg módon. Ha lejjebb adjuk, és 0,07% a pontosság, ami még mindig elképesztő jó érték, akkor legrosszabb esetben 44 cm-t fog késni a szalag 48 perc alatt. De ha mérjük, hogy hány centit késik a szalag egy perc alatt, és a következő percben azzal a hajszállal gyorsabban továbbítjuk, akkor a második perc végére ismét tökéletes szinkronban vagyunk. A 0,07% pontosság már bőven elég a nyávogás elkerüléséhez, és reálisabb, mint a 0,007%.
Üdv: Jácint
0
üdv: a pontossághoz, milyen hosszú a leghosszabb lejátszott film?
Bálint
0
48 perces a legnagyobb tekercs, ami ráfér a gépre.
0
Szia!
48 perc.
Üdv: Jácint
0
Valaki.
Valaki összefoglalná hogy mi folyik itt, mert azt már látom hogy lassan két oldal is kevés lesz, hogy beleférjen a moncsimba. :)
Csak azért kérem mert már nyúlok nyúlik, ti nyúli anyi vétyinyúli. :) Hátha tudnék segíteni.
J.
0
Mi folyik, mi folyik, a szokásos, ami folyni szokott. A fele nem érti a feladatot, a másik fele érti, de nem tudja a megoldást, és mindenki okoskodik, mint az ecceri rabbi a baromfivész idején, és kezd a disputa a szokásos pocskondiázásba fullni.
Pedig csupán annyiról van szó, amit Jaca írt: szeretnék egy működőképes kapcsolási rajzot kapni frekvencia jeladóval felszerelt DC motor pontos fordulatszámon tartása végett. Gondoltam, hátha valaki már csinált ilyet, vagy rendelkezik valami szakkönyvvel, amiben szerepel ilyen. De úgy látszik, nincs ilyen személy az olvasók között, úgyhogy lassan el is süllyedhet ez a topic.
0
Szia!
Fog ez alakulni. Odáig már eljutottunk, hogy kell egy stabil négyszögjel, ami megegyezik az encoder által ideális esetben visszaadott jel frekvenciájával. Kell egy PWM generátor, aminek feszültségvezérelt a kitöltési tényezője. Aztán már csak a két négyszögjelet kell összehasonlítani, és ha előbb jön a referencia jel, akkor csökkenteni kell a feszültséget, ha később, akkor növelni. De kell egy alapfeszültség, ami önmagában a pontos értékhez nagyon közel tartja a motor fordulatszámát. Aztán majd ezt a feszültséget kell löködni.
Majd rajzolok egy blokkvázlatot hozzá.
Üdv: Jácint
0
Heló !
Fogunk egy ilyet: http://hu.farnell.com/iqd-frequency-products/lftvxo009912/crystal-oscill... (hogy kicsi legyen a hőfokfüggése) Egy szintillesztés kell utána 3,3V-ról 5V-ra.
Utána kötsz egy 4059-et, ezzel finom lépcsőben tudod állítíni a referencia frekit. (rajz a csatolmányban)
Aztán fogsz egy ilyet: https://assets.nexperia.com/documents/data-sheet/74HCT9046A.pdf (ez jobb mint a sima elődjei)
14. pin -re adod a referenciát
3. pin -re a motorról jövő encoder jelet
13. pin -ről elviszed az adatlap szerinti egyszerű hurokszűrőre
Az ez után előálló DC-jellel pedig szabályzol egy úri ízlésed szerinti PWM szabályzót legyen az akár diszkrét akár IC-s.
Csak le kellene mind ezt rajzolni. Menni fog? Ez utóbbi kérdés MM-felé szólt.
Laci
0
A 4059 jó ötlet.
A hct9046 adatlapon mire is gondolsz? A fig 4. -n a VCO in-re menő vezetéket kössem át a PWM bementére? Van ám ezzel egy pici baj... hogy kisüti a kondit. Vagy csináljak rá megaohmos impedanciát? Akkor meg össze fog szedni minden brummot meg zavart... kacifántos dolog ez...
0
A Fig 34.-et nézd! Az IC-ből csak a fáziskomparátort használnád. A 600ohm 470nF soros tag szerinted mekkora impedanciát képez 2Khz tájékán? (Három méter acél és ólom burkolat kell oda a zavarok ellen.) :) Tehetsz utána egy Gain=1 -re visszacsatolt OPA-t impedancia illesztésként hogy terhelhető is legyen. Vagy ugyan ezt kialakíthatod egyszeres erősítésű aktív szűrőként is ha ragozni volna kedved.
.
A VCO szerepét kvázi itt a PWM-el szabályzott motorról visszajövő tacho jel képezi.
Laci
0
Ja, ja, most már értem, pontosan hogy gondolod. No, majd kipróbálom a dugdosón, aztán beszámolok a tapasztalatokról. De lehet, hogy nem holnap lesz, mert össze kellene még lapátolnom egy 4000DS-t is, hadd vigye a gazdája.
0
így gondolod?
0
Ilyet már csináltam, de ez is eléggé lengedez.
Itt viszont nem kéne lengeni, mert akkor nyávog a hang. Ide egy nagyon finom szabályzás kell, ahol a beavatkozás mértéke arányos a hiba mértékével. Arra viszont ez a kapcsolás nem alkalmas.
0
Akkor a hibajellel tölts egy kondenzátort, és műveleti erősítővel add hozzá vagy vond ki az alapjelből. Míg fennáll a hiba, egyre nagyobb mértékben fog beavatkozni. De lehet, csak azért lengett be, mert túl nagy mértékben avatkozott bele. De lehet, hogy kombinálni kellene, vagyis csinálni egy DC-t is a tacho jeléből, és ez az áramkör pedig csak azt biztosítaná, hogy a motor szinkronban legyen az alapjellel.
Üdv: Jácint
0
Ezt is megpróbáltam. Ha kicsi volt az időállandó, akkor szinte semmi hatása nem volt a dolognak, ha viszont nagyobbra választottam, akkor baromi lassú lett a beavatkozás mértéke, és mivel a töltési és a kisütési idő sem sikerült teljesen egyformára, még az átlagsebességet is elhúzta!
Az ördög a részletekben búvik meg.
0
A kisütést egy diódával hamar meg lehet oldani. Vagy egy tranzisztorral.
Üdv: Jácint
0
Megtennéd, hogy belefirkálod a fenti rajzomba, hogy gondolod? Műszaki ember rajzból ért... ;-)
0
Ihol van
Üdv: Jácint
0
Jól látom, egy ellenálláson keresztül töltöd, de azonnal teljesen kisütöd? Ezt miért így csinálod? Ha kisebb a sebesség, akkor csak lassan gyorsul, de ha kicsit is túllépi a kívánatost, akkor azonnal megáll... ez így nem egy bazinagy fűrészjel lesz a motoron?
0
Jól látod, de ez csak az eltérést mutatja. Ezt a feszültséget kell hozzáadni ahhoz a feszültséghez, amivel üresjáratban 99%-ban pontosan megy a motor.
Ha csak kicsit késik, akkor kicsit ad hozzá a nyugalmihoz, ha sokat késik, sokat ad hozzá. Ha kicsit gyorsabb, kicsit lassít, stb
Üdv: Jácint
0
.
0
Szia!
Mozifilmszalagot kell továbbítani igen nagy pontossággal. Ami adott, az egy DC motor egy enkóderrel, ami 2000 impulzust ad másodpercenként, ehhez kellene egy olyan áramkör, ami másodpercenként pontosan ugyanannyi fordulatra készteti a motort.
Üdv: Jácint
0
Szia !
Adott az enkóder kimenő jele, kb. 2Khz. Ha nem tökéletes négyszög, formálni kell.
Egy 4060-al és egy alkalmatos kristállyal előállítasz egy 2Khz körüli referencia frekit.
Egy 4046-al vagy 74HC74-el csinálsz egy fázisdetektort. Hibajel erősítő egy OPA-val és ott a DC jeled amivel szabályzod a PWM jel kitöltését. Ezt a PWM jelet vagy Te csinálod meg vagy olyan H-bridge kimenetű PWM szabályzót keresel ami alkalmas a feladatra és beszerezhető számodra. Ez egy szimpla zárt hurokban történő szabályzás hozzákötve mereven a referencia frekihez.
Ehhez tényleg nem szükséges mikrokontroller, ezért nem is értem mások miért tudnak csak abban gondolkodni. Azt sem egyszerűbb összehozni, annak a fejlesztésével is lehet bőven szenvedni. Sőt, megkockáztatom a kijelentést, a végső megvalósuló kapcsolás nem vagy alig egyszerűbb a diszkrét megoldásnál.
Laci
0
Sziasztok !
Gyanúsan kevésnek tartom azt a kb 2kz-es enkóder jelet.
Ha már rá írva nincs akkor én megszámolnám egy led segítségével 1 fordulat villanásait.Pontosan.
2khz vagy esetleg 5-10 khz a konkrét áramkör kiválasztásnál sokat számíthat.
Üdv
0
Nem vagyok teljesen hülye, megforgattam labortápról, és megmértem oszcilloszkópéval. :)
Amúgy ez egy kifejezetten lassú kefés motor, 2000rpm a névleges sebessége. Az 33,33 Hz. 2k/33,3 = 60, márpedig 60 pulse/rev az teljesen reális, sőt, kifejezetten nagyvonalú, vannak, akik 30 pulse/rev-re is csinálnak szabályzásokat.
0
Szia,
Ne haragudj , csak a szervomotoros eddigi tapasztalataimból gondoltam kevésnek !
Tulajdonképpen a szabályozás elejére egy digital/analog átalakítás kellene pl: LM331
pulse/analog converter
Fordított alkalmazás gyakoribb..
Egyetlen cél ic-t nehéz lesz találni.
Üdv:
Feri
0
Nem haragszom. Általában tényleg gyorsabban pörögnek ezek. De nekem most pont ilyen kell. Még ezt is leáttételezem 16:20-hoz, és úgy lesz jó. Ugyanis 1500 és 1000rpm-re van szükségem a végén. Az 1500-al még nem is lenne baj, mert ott még bőségesen van erőtartaléka a motornak, de az 1000 az már 2/3 teljesítmény, és az már éppen csak hogy...
0
Szia M M !
Találtam konkrét ilyen célra fejlesztett IC-t.
MAX14870 , MAX14872
Megépített panellal is /nem olcsón /de kapható.
http://hu.farnell.com/maxim-integrated-products/max14870evkit/evaluation-board-dc-motor-drive/dp/2530751
Driver Overload Current Limit_: 3A
Üdv :
Feri
0
Ez nem az, ami nekem kell. Ez csak egy H híd. Ilyet tudok csinálni diszkrét elemekből is.
0
Na ja, valami ilyesmi... de most komoly, hogy erre a nem éppen különleges feladatra nem létezik egy kidolgozott kapcsolás az egész kerek interneten, vagy hogy nem gyárt senki egy berendezésorientált IC-t, amiben minden benne van készen? 2017-ben ezt nekem ki kell fejlesztenem nulláról? Nem jön, hogy elhigyjem...
0
Szervusz Multi Multiplikátó!
Esetleg el lehet játszani a TDA1085 erre a célra történő alkalmazás gondolatával. :-)
Az végeredményben azt tudja ami neked kellene, csak a végét kell illesztened.
Üdv:
exGelkás
0
Na igen, ahogy nézem az adatlapot, benne van 1:1, amit a mikrokontrollerre kéne lefejleszteni, talán csak annyi a nehézség, hogy fázishasításos fordulatszám szabályzást csinál az IC, ehelyett kéne DC PWM-et kivarázsolni valahogy...
0
És ez még be is szerezhető!
Lehet, hogy ez lesz a végkifejlet...
0
Szia MM !
exGelkás ajánlott a "végére" egy IC-t. Én ajánlanék az elejére a frekvencia/fordulatszám tartására. http://html.alldatasheet.com/html-pdf/29342/TI/UC3633/20/1/UC3633.html
Már csak PLL kimenőjeléből a PWM jelet kell "összebarkácsolni" /egy háromszögjelet generáló és egy ezt a bemenő jellel összehasonlító komparátor, az az még egy tok/ ennyi.
Megj. Nem vagyok meggyőződve hogy ez esetben, (fix. sebesség és irány) van értelme behozni a rendszerbe a PWM szabályzást. Az általad leírt fordulatszám igény a maximálishoz képest talán elbírna egy analóg motor áram szabályzást is egyszerüsítve ez által a kapcsolást.
Laci
0
Sajnos kell a PWM. 24V 2,5A ez a motor, ezt disszipatív módszerrel nem nagyon lehet szabályozgatni, mert gyermekfejnyi méretű hűtőborda kellene hozzá. De a PWM nem gond, arra van egymillió megoldás, nekem magamnak is van a kockás füzetemben kétféle U->PWM átalakító, amelyet megépítettem, és biztosan működnek. Számomra az a rész a problémás, amely az encoder frekvenciájából és az etalonból generálja azt a bizonyos U-t...
0
Szia!
Akkor most melyik a nagyobb problémád? A frekvenciából feszültséget gyártani, vagy a két feszültséget összehasonlítva előállítani a PWM-t?
Én valamikor régen építettem egy motorvezérlőt, ott egy tacho volt a visszacsatolás. SG3524-re épült.
Üdv: Jácint
0
Mindkettő probléma. Először is a frekvenciából feszültséget csinálni _kis_reakcióidővel_, másodszor pedig ebből egy olyan jelet képezni, amely a motorra kiadandó teljesítménnyel arányos, és nem lengedez össze-vissza, mint a bíró seggiben a lófasz. Itt az ördög a részletekben búvik meg!
Nem állítom, hogy ezek leküzdhetetlen problémák, de most tényleg nekem kell ezzel küszködnöm? Tényleg soha senki nem csinált még egy ilyen vezérlést?
0
Szia!
A 2917-el milyen volt a DC jeled? Csak simán pörgesd meg a motort, és szkóppal nézd meg, hogyan változik, ha megterheled a motort kisebb-nagyobb mértékben.
Ha az elfogadható, akkor csak azt kell eltalálnod, ha referenciafeszültséghez hányszorosát add a hibának. Vagyis a hibajelerősítő erősítését kell beállítani, hogy ne legyen túllövés, sőt még némi RC taggal is szűrni kell.
Üdv: Jácint
0
A 2917-el az volt a fő baj, hogy a frekvencia-feszültség konvertere túlontúl lassan reagált. 3M3 / 220nF RC taggal volt csak értékelhető tartományban a feszültség, de ott már lassú az az IC. (Erre mondjuk az adatlapja is felhívja a figyelmet.) Az, hogy túl is reagált a szabályzás, csak látványossá tette a problémát. Finomítgatni nincs értelme, mert akkor is folyamatosan hullámozni fog a sebesség, legfeljebb nem olyan látványosan.
0
Szia!
Szerinted mekkora a valószínűsége, hogy valaki éppen a neked kellő kapcsolást már megrajzolta? Hány egyedi paramétere van az általad igényelt elektronikának? Becslésem szerint kb. 20-30 darab! Hisz csak a felhasznált motornak van öt vagy tíz állandója attól függően, hogy mennyire precízen kell kidolgozni a rendszert:
-feszültség és áram a névleges munkapontban, -feszültség szabályozási intervalluma és az ehhez tartozó áramfelvétel intervalluma, -tacho impulzusszáma és elektromos paraméterei, -szabályozás pontossági elvárása, -szabályozás elvárt időállandója vagy időállandói (futássebesség oda-vissza különbözhet, vagy lehet nemlineáris - tehát amplitúdófüggő), -rendelkezésre álló tápfeszek vagy célszerűen választandó tápfeszek, -maximális tápingadozás, -tápfeszzaj, -tápágakra maximálisan visszajutó nagyfrekvenciás teljesítmény amplitúdója és frekvenciaspektruma (nehogy zavarjon valami kényes technikát az adott készüléken), -egyéb bemenetek és beállítási pontok, -átkapcsolási lehetőségek, stb.
Nem sokkal egyszerűbb leülni és kitalálni az elvi sémát egy délután alatt, egy másik délután pedig kizsebszámolózni az alkatrészek értékeit?
:idea:
Kicsit segítek az elvi elrendezéshez:
A tachó jeléből úgy lesz a fordulatszámmal azonos jel tetszőleges pontossággal, hogy egy monostabil billenőáramkört aktiválsz a tachojel impulzusaival. Az időállandót természetesen a max. freki határozza meg. A billenőáramkör egy áramgenerátort kapcsolgat egy RC tagra, melyen a fordulatszámmal egyenesen arányos feszültség jelenik meg. Az RC tag időállandóját természetesen a megkívánt pontosság határozza meg. A szinteltolás egy másik stabil áramgenerátorral realizálható.
8)
Ha a kapcsolás dinamikája nem elégséges a kívánt pontosság mellett, akkor egy bonyolultabb áramkört kell használnod, amely sample-hold rendszerben szolgáltat arányos feszültséget a fordulatszámmal két tachoimpulzus között. Tehát direktbe méri a két futóél között eltelt időt és aktualizálja a kimenetet impulzusonként. Ez az eljárás nagyon gyors, de nagy szuperponált zajfeszt is szolgáltat, tehát a nagy időállandójú integráció úgyis kelleni fog, ha nagyok a pontossági igények. Nem valószínű, hogy ilyen gyors rekcióidőre van szükséged, ezért csináld egyszerűen.
:?
Tulajdonképpen mekkora stabilitásra van szükséged és milyen beállási idővel?
Ne a bíró úr anális gyönyörein járjon az eszed, hanem állj neki megrajzolni a kapcsolást!
0
Szerinted hány ugyanilyen motort gyártott a Toshiba, mint amilyen nekem van? Szerinted ezek közül soha, senki, egyet sem épített még be sehova? :)
Neki fogok állni megrajzolni a kapcsolást, ha nagyon muszáj. De gondoltam, tán csak megrajzolta már valaki, oszt max egy-két R-t meg C-t kell benne aktualizálni, akár ha kísérleti úton is... de úgy néz ki, hogy nincs ilyen szerencsém, állhatok neki nulláról kifejleszteni azt, amit már tuti-bizti kifejlesztett más is.
A beállási idő nem számít, de utána atomstabilan kell mennie. A képen látható filmdigitalizáló eszközt fogja hajtani a motor. Ha rángat, akkor megnyávogtatja a hangot, ha meg ingadozik, akkor hol sietni, hol késni fog a szájszinkron, és lehet újra szájra vágni a hangot az egész filmben. Szóval ez kényes dolog. Az eredeti, kalickás aszinkron motorja úgy ahogy volt, alkalmatlan is volt a feladatra.
0
1. Arról találni adatokat a neten, hogy milyen az atomórák stabilitása, bár ott is két nagyságrendre szórnak az adatok a típusoktól függően. Hogy a pesti szlengben mi az "atomstabil", azt sajnos nem értem. Kérlek határozd meg számszerűen ezt a paramétert.
2. A kívánt szabályozóáramkör nem tűnik valami bonyolultnak, és szerintem kihozható értelmes mennyiségű univerzális alkatrészből. (Én személy szerint útálom a spéci IC-ket, melyeket nem kapni általánosan.) Ne feledd, Jehova azért teremtett 4 műveleti erősítőt egy DIL14-es tokba, hogy éppen ki tudd hozni belőle a fordulatszám-stabilizátort. Szerintem ez egy egyszerű céláramkör a feladatra. A kapcsolüzemű motortápra fog kelleni még egy 555-ös, vagy egy kettős műveleti erősítő, vagy 494-es. Igazán kár itt panaszkodni a bonyolultságra. Méretre szabni a kapcsolást meg muszály.
3. Használj 30kHz feletti frekvenciát a kimenetre és a motor tápfeszét szépen szűrd meg méretezett LC taggal a jó hatásfok és a lineáris karakterisztika érdekében - ha már nem fér el a nehéz fémvázra egy diszipatív szabályozó tranzisztora. Így lesz zavarmentes a berendezés.
0
1. oké, mondjuk, hogy a legnagyobb föltehető orsó kb. 70.000 képkocka, vagyis 48 perc hosszú. Ezen a tápvon megengedek mondjuk 0,2 mp eltérést, annál több már durván látszik. Tehát 2880mp-n 0,2, azaz 0,007% pontosság volna kívánatos.
2. rengeteg műveleti erősítőm van, egy egész doboznyi. De hol a kapcsolási rajz és a hozzá csatolt alkatrészméretezési segédlet?
3. hát ja, akár fűthetném is a gépvázat, igen, a 30-40W elpocsékolása nem számít. Az viszont annál inkább, hogy az is egy plusz hibát visz a dologbs, a szabályzóelem aktuális hőfokától függően. Persze, ha korrektül kezeli a tacho jelét az áramkör, akkor ez nem sokat számít... de a tacho nélküli szabályzásoknál öngól.
0
Na végre világos!
Ha rendesen leírtad volna az igényeidet, nem lett volna ennyi szócséplés belőle. Az egyszerű RC tagokat használó fordulatszámstabilizátorral 0,1%-os pontosságot lehet elérni különleges tervezési szempontok betartása nélkül. Jól tervezett áramkörnél ez a hiba szisztematikus, tehát a rövid távú stabilitás ennél jobb is lehet. Ez sokmindenre elég, de nem mindenre. A te általad megkívánt abszolút pontosság majdnem két nagyságrendel nagyobb, tehát itt kvarcoszcillátoros időnormál használata már indokolt. DE!!! - nem értek viszont egy technikai részletet a masinádon:
Ugyebár ott mozog a filmszalag, amely a kiválasztott időpillanatban be van fényképezve egy arra alkalmas kamerával. Ezt az időpillanatot fázisban kell tartani a kamera mentési ciklusával. Gondolom ezt a szinkront a perforáció biztosítja a filmszalagon. Így viszont nyilvánvaló, hogy a szinkronizálásnak van egy elég tág szabályozási intervalluma, melyet én nem tippelek pontosabbra 1%-nál. (Lehet az 10% is.) Ha csak ezt kell tartani nyávogásmentesen, akkor arra alkalmas az egyszerű RC szabályozás. A hangfájl egyszeri abszolút-hosszkorrekciójára képes a Cool Edit, vagy valamilyen hasonló program. Nem lenne elég így megcsinálni?
Ha viszont az abszolút pontosságra utazol, akkor marad a kristályoszcillátor és a fáziszáras szabályozóhurok. A szinkron tartása könnyen detektálható és tartósan kijelezhető az üzemzavar időszakos fellépése a magára hagyott készüléknél.
A másik lehetőség a szinkronmotoros hajtás. Ennek a meghajtása sem bonyolult. Nem kell hozzá mikrokontroller, csak egy erre a célra kitalált, bárhol megvásárolható céláramkör, pl.: L297+L298, A3959, A3979, stb., melyet egy feszültségvezérelt RC oszcillátorról vezérelünk fel lassan az üzemi fordulatszám közelébe. Ezt elérve az RC áramör felakad a leosztott kvarcjel szinkronizáló impulzusaira, és tartja az abszolút pontos fordulatszámot. A mikrokontroller tehát könnyen megúszható. Kérdés, kinek mi az egyszerű? :D
PS: Mit szólnál ahhoz a poénhoz, hogy egy fogasszíj-áttétellel ráillesztesz egy "atomstabil" floppymeghajtómotort a másológépre. Nem lenne elég a teljesítménye? Esetleg többszörösére lehet emelni a fordulatszámát a nyomaték megtartása mellett. Ehhez persze tápfeszültségemelés, meg ezt kezelni tudó erősítőfokozat kell a meghajtó IC-re.
0
A kamerának nem baj, ha van egy kis jitter, de még az sem, hogyhe teljesen más sebességen jár a gép, mert minden kockáról egy felvétel készül, és jézus. Visszajátszáskor viszont ezek a képkockák pontosan 1/25 mp-vel követik egymást, és mivel a hangkártya mintavételezési frekvenciáját nem tudom hozzákapuzni a tacho jelhez, ezért a hangfelvételi sebességnek kell pontosnak lennie.
Igen, szét tudom húzni a cool edittel, ha kell. A gond akkor van, hogyha a motor sebessége változik felvétel közben, mondjuk mert felmelegszik egy csapágy, és viszkózusabbá bálik benne a kenőanyag, vagy mert ahogy telik a felcsévélő orsó, úgy változik a nyomaték a felcsévélő kuplungon. Mert ha menet közben változik a sebesség, akkor sehogy sem fog stimmelni a hang.
A floppy ide nudli. Még a színes lézernyomtatóból kiszerelt mágneses forgórészes motor is gyengusz.
A szinkrongép jó lenne, nem is kell agyonkomplikálni, mert ma már a hálózati 50Hz kristálypontos, a szinkron fordulatszám meg 1500/perc egész számú többszöröse, mit ad isten, nekem pont annyi kell. Nem is vacakolnék a vezérlésével, a DC motorral beindítanám, és csók. Csak az a baj, hogy fogalmam sincs, honnan akasszak le egy 40+++ W-os szinkronmotort. Az Akai GX-4000 meg hasonlók alig tízegynéhány wattosak, de még a hammond orgonában is csak 32W-os van.
0
Azok a "tízegynéhány" wattos motorok nem is olyan gyengék. Általában még elviselik a dupla vagy tripla fordulatszámot is azonos nyomaték mellett. Biztos hogy nem nézted be a másológép mechanikus teljesítményigényét? Az eredeti 40W - az nem a hálózatból felvett teljesítménye volt egy 40%-os hatásfokú motornak?
:idea:
Amúgy sok lehetőség van, pl. itt egy megfizethető vadiúj motor. Elég lenne egy ilyen? Számoljunk utána! 2Nm és öt fordulat másodpercenként az annyi mint 2Nm*2*3,14*5ford./s=63W! Tehát ez bőven elég a mechanika melegen tartásához, és az élettartama a csapágyazással adott és egy precíz gépről beszélünk. Nem is foglal sok helyet. Lehet hogy légárammal kell majd hűteni, de az se vészes.
0
Szia !
Bár tényleg kecsegtető lenne léptető motor használata a kefés helyett de...
Legyen szó akár optikai akár mágneses hangcsíkról, azt folyamatos mozgással kell(ene) letapogatni!
A fülünk sajnos e téren nagyon "gyatra", meghallja azt is amit nem kellene. :) De talán ennek a motornak az 1,8 fokos lépésszöge a szükséges fordulatszámmal együtt már lendtömeg nélkül is folyamatos mozgást generál.
Persze a léptető motor alkalmazása sem kerüli meg a hosszú idejű stabilitás igényt csak mechanikusan egy egyszerűbb és időtálóbb megoldást kínál. A vezérlés továbbra is ha nem móricka szinten csináljuk akkor hasonló bonyolultságú lesz mint a kefés motoros megoldásnál.
Most próbáltam rákeresni de fényt kapott a topik amelyben MM 3 "fázisu" BLDC motort keresett. Volt is újjonan egy vagyonért plusz a hozzávaló kontroller egy másikért. :) Ha jól emlékszem, az is kvarchoz PLL-el szinkronizált kütyü volt imponáló jellemzőkkel. De hát annyiért (a kettő együtt bőven 100K fölött) el is várható. Ez lényegében olyan mint a videókban a capstain vagy a fejdob motor csak izmosabb.
Laci
0
Igen, kerestem, de végül meguntam úgy a bldc, mint a szinkronmotor-keresést, és belevarrtam a fiókban heverő DC motort, mondván, hogy csinálok hozzá egy freki visszacsatolt elektronikát, és jézus.
Léptetőmotor fel sem merült, nem csak a folyamatosság miatt (az még nem lenne gond, van a hangfejnél egy bazinagy lendkerék), hanem mert egy-egy esetleges lépésvesztés véletlenszerű eltolódásokat generálna. Persze, enm túl sokat... de a sok kicsi sokra megy.
0
Mitől vesztene lépést egy enyhén túlméretezett motor? Valaki hengerműnek használná a gépet gémkapcsok hidegsajtolására? A visszacsatolás nélküli szinkronhajtásnak van egy nagy előnye a többi verzióhoz képest:
Nem kell megtervezni sem a statikus, sem a dinamikus paramétereit a visszacsatolásnak!
Csak a felfutás sebességét kell méretezni, de azt a számítást gondolom bárki képes elvégezni öt perc alatt. Egy kristállyal szinkronizált RC oszcillátort meg bárki össze képes hozni. Eredményül pedig abszolút pontos hajtást kapunk, nem kell semmi spéci áramkörtechnika, termosztát, stb..
0
Szia !
"PS: Mit szólnál ahhoz a poénhoz, hogy egy fogasszíj-áttétellel ráillesztesz egy "atomstabil" floppymeghajtómotort a másológépre. Nem lenne elég a teljesítménye? Esetleg többszörösére lehet emelni a fordulatszámát a nyomaték megtartása mellett. Ehhez persze tápfeszültségemelés, meg ezt kezelni tudó erősítőfokozat kell a meghajtó IC-re."
.
Ez a motor: http://www.instrumentalparts.com/md-969yh03.html direktbe, áttételezés nélkül is elvinné. Fogtam le, van benne nyomaték.
De valószínűsítem: ekkora átalakítás nincs tervbe véve. :)
Egyébként ebben használatos, a bakelit lemezjátszót utánozzák vele. https://www.youtube.com/watch?v=elWzNiGWOvk
Laci
0
Nem megy neki olyan jól a bolt, hogy ilyen kiadásokba verje magát. Olcsón akarja megcsinálni, de azzal meg sok a munka. Ez a tény nem igazán tetszik a topiknyitónak - de lassan rá fog ébredni, hogy muszály lesz munkát áldozni a projektbe, ha sikert akar elérni.
0
MODERÁCIÓT KÉREK!
0
Szia!
Ha leírtad volna az elején, mihez kell és milyen pontossággal, már rég elvetettük volna az analóg szabályzást.
Üdv: Jácint
0
Magam is csak most szembesültem vele, amikor jobban végiggondoltam.
0
Szia !
Csak halkan jegyzem meg hogy a PLL az a megvalósítás alkatrészeitől függetlenül egy analóg áramkör a lényegi részét tekintve.
Laci
0
szia: van egy sejtésem, a DC motor nem a legalkalmasabb erre a feladatra, ezért nem találsz kész rajzot.
Lehet, hogy a felvevő egységből kellene szinkronjelet felhasználni?
Bálint
0
A kamerának mindegy, az nem méri a képváltások közti időt. Ha kap egy szinkronjelet, zsebrevágja az aktuális képkockát, és lép tovább. A hang és kép között meg a vindóz nem jegyez fel szinkronjeleket. Egyszerűen lerakja a képeket is, a hangot is, de ha mondjuk a képfrekvenciát átírom 25-ről 24-re, akkor a hanglejátszás változatlan sebességű marad, a képhez képest siet, és előbb ki is fut a vége, mert azt olyan sebességgel játsza le, ami annak a mintavételezési frekvenciája. Ha pedig a hangsebesség változik, mondjuk mert üzem közben melegednek az alkatrészek stb, akkor meg sehogy sem lehet összehozni a képet és a hangot. Ezért kellene a hangot megfelelő és konstans sebességgel rögzíteni. A képanyagnak tök mindegy, mert azt aztán szabadon választott sebességgel játszhatom vissza, a hangot (szoftveres konverzió nélkül) viszont csak a felvételi sebességgel tudom visszajátszani.
A DC motor nagyon alkalmas erre a feladatra, mert nagy nyomatéka van. Adott esetben egy 40W-os aszinkron helyére kerül be egy 60W-os DC, bőven megfelelő, csak a szabályzását kell megoldani. És ezt már sokan, sokszor megoldották. Eleve pont ezért került bele az enkóder gyárilag, hogy ezt meg lehessen oldani.
0
A nagyok már optikai szenzorral vigyázzák a szalagsebességet: 8)

http://74nullanulla.hu/cikkek/2017/08/04/megtalaltuk-az-okot-hogy-ujra-e...
0
Nincs rá szükség. A filmszalag perforált, fogasdobokon fut, bárhol lehet a jeladó. (Az új motor is miniatűr bordásszíj áttétellel hajtja a pilletengelyt, kicsúszás kizárva.)
0
Szia!
Így, hogy tudom mihez kell, már más a leányzó fekvése. A felfutó éllel indítasz egy számlálót, lefutó éllel megállítod, és eltárolod egy regiszterbe, aminek a kimenetén ott egy D/A pl R - 2R ellenálláslétrával (1%-os ellenállásokból, akár SMD kivitel, azt még tudok is szerezni neked, ha kell). Lesz egy baromi pontos feszültséged a fordulatszám arányában. A felbontása a számlálótól függ. Ezzel meg már tudsz vezérelni valamilyen PWM áramkört (még mindig az SG3524-et javaslom, jól hozzáférhető a belső felépítés).
Ja, az indítást RS tárolóval csináld, akkor kiszűrhető mindenféle prellezés. Lefutó él tárolás, aztán kis késleltetéssel reseteled a számlálót, és indulhat a következő móka.
Üdv: Jácint
0
Erre már magam is gondoltam... de ehhez jó nagy felbontású számláló kellene azért... legalább egy 12 bites!
Meg gyors órajel. Egy félperiódus 250 uS, ezt kellene még fölbontani 4096 részre, akkor egy bő 16Mhz órajelnél járunk... oj-oj...
0
Szia!
Másodpercenként hány impulzusod jönne a várt üzemi fordulaton? (Bocs, csak késő van, hogy számolgassak).
Üdv: Jácint
0
Mint fentebb írtam, 2kHz körül van a tahó, tehát 2000 pulzus / mp.
Elég finom szabályzást tenne lehetővé ez a jeladó - csak kéne hozzá valami elektronika, ami elég gyorsan és magabiztosan le tudja reagálni az esetleges változásokat.
0
Szia!
Tehát 250uS alatt 0,007% eltérés. Az 17,5ns. Tegyél fel egy videomagnóból motort, amit fűtött kvarccal pörgetsz. 250uS-ot 14 biten kellene felosztani 15ns-hoz.
Bár ha van egy jó referenciajeled, akkor csak azt kell nézni, hogy előbb vagy később jön-e a lefutó él, és ahhoz szabályozni.
Üdv: Jácint
0
Ja, ja, igen, felmerült ez is, hogy 4046 és fázis komparáció.
Végülis műszakilag indokolt is, miért a változó taho jelet konvertáljam feszültséggé, miért ne a stabil referenciajelet frekvenciává?
Ez a fűtött kvarc dolog hogy is van? Még nem hallottam ilyesmiről...
És még egy fontos kérés: létezik ma valahol olyan rezgőkvarc szaküzlet, mint amilyen az eötvös utcában volt hajdan? Ott mindenféle kvarcok kaphatóak voltak... Mert az a tapasztalás, hogy kissé hiányos a választék az általam ismert boltokban... "nesze, itt van 16MHz, 20Mhz, 40MHz, ha egyik se jó, akkor meg szíjjál gázt!"
0
Üdv!
Kvarctermosztát.
0
Szia!
Szerintem mindenképp a fáziskomparáció irányába indulj el. Ha akármilyen tachoval is feszültséget nézel, akkor ha késik 20X 10ns-ot, akkor az a végére 200ns késés lesz.
Ha adott idő alatt fordulnia kell 100000-t, akkor forduljon annyit.
Üdv: Jácint
0
Szia !
Ha felmerült akkor miért nem ebbe az irányba mész? Űberprecizitást akarsz Münchausen módra a saját hajánál fogva rángatni a szabályzást?
Kell a feladathoz egy az igényelt pontossághoz igazodó időalap. A kiinduló alkatrészük többnyire egy rezgőkvarc.
Léteznek hőmérséklet kompenzált áramkörök, a TCXO-k. http://www.radio-electronics.com/info/data/crystals/tcxo.php
"Nyálazgasd" az adataikat: http://www.ndk.com/en/products/search/tcxo/index.html vagy egy példa: https://hu.mouser.com/ProductDetail/Maxim-Integrated/DS32KHZSNTR/?qs=GxO...
.
De ha ez a precizitás sem volna elég, ott van fölötted több példányban. A JPS műholdak.
Használhatod azok időalapját is. http://www.diyphysics.com/2012/02/19/d-i-y-gps-disciplined-10-mhz-freque...
Vagy egy másik megvalósítás: http://www.rt66.com/~shera/QST_GPS.pdf
Laci
.
Második napja megy a vacakolás ezzel a témával. Már háromszor megrajzolhattál volna egy kapcsolást és valamilyen próbapanelen be is lőhetted volna. Irodalmat is küldhetnék minden érintett témában de le lettem már ez ügyben korábban cseszve. Egyszerűen NEM szeretnek olvasni a kérdezők (tisztelet a kivételnek) még akkor sem ha csak rá kell kattintani. Ennek a kvarcoszci témának is baromi nagy irodalma van "csak" rá kellene keresni.
0
Hétvége volt, okostojás, zárva voltak a boltok. Tegnap berendeltem ezt-azt a kísérletezéshez, ma délután kihozzák, aztán majd meglássuk, mire megyek velük. Remélhetőleg többre, mint a te hadovázásoddal, mert ha mégsem, akkor sose lesz ilyenem. :D Tőled ugyanis még egy skiccelt kapcsajzot sem kaptam, nemhogy kész megoldást. Úgyhogy felesleges nagyképüsködnöd, mert egyelőre fej fej mellett vagyunk. :-p
0
Ugye nem azt várod hogy én vagy bárki más építse meg HELYETTED?
Azért egy panelszinten javítani képes "egyednek" illene többet tudni a kvarcoszcikról. Lehet megsértődni...
Laci
0
"Tudtok kipróbált, bevált sémát ajánlani, vagy valami beszerezhető, feladatorientált IC típust mondani?" - írtam a topicindító üzenetben.
Azt hiszem, ez elég konkrét.
Ha kioktatásra meg pocskondiázásra vágyok, akkor majd azt fogok kérni.
Komolyan, néha az az érzésem, a fél elektrotanya diszlexiás. :-(
0
szia: precízitást kívánó készülékekben, műszerekben a kvarc egy termosztátban van elhelyezve
Ez egy hőszigetelt doboz, amiben állandó 40 C fok körüli hőmérsékleten tartják a kvarcot,1 fok pontossággal
Van benne egy megfelelő teljesítményű fűtés PID szabályzó áramkörrel
Általában terepi készülékekben, katonai alkalmazásokban használják a nagyobb hőmérséklet-ingadozás kiküszöbölésére
Nem túl rég a Rádiótechnikában (2016 szeptember) is volt egy leírás termosztát építésről
Bálint
0
Szervusz Multi Multiplikátó!
Valami hasonlóra lenne szükséged. :-)
Üdv:
exGelkás
0
Hja... csak itt is fájón hiányzik a visszacsatolás.
Az pedig szükséges volna. Ugyan a terhelés nem változik (jelentős mértékben), viszont egy kuka kis pwm vezérlés egy kicsit mégiscsak mászik annak fényében, ahogy az alkatrészek melegszenek, ezt már kitapasztaltam. Márpedig most nekem nagyon pontosan és egyenletesen kell menni ezzel a motorral.
0
Ez csak egy H-bridge meghajtó de annak tökéletes. Többet ne várj tőle.
L.
0
Szia !
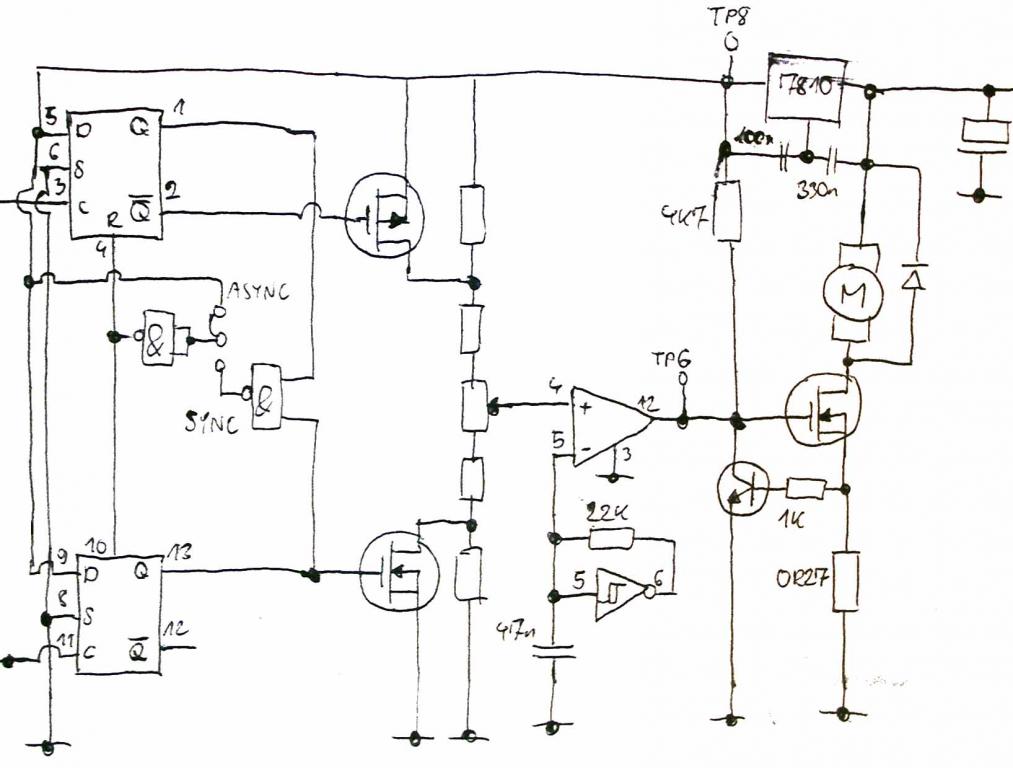
Csatoltam egy 7474-el megvalósított PD-t mert emlékszem hogy a 4046-al "szenvedtél"
Ezt ugyan hangolófeszhez csinálták egy generátorban de lehet vele játszani.
Laci
0
Ja, de utána csináltam 4013-ból meg egy and kapuból, és aztán kiderült, hogy egy rohadt prell szivatott, nem a 4046. :) De ez már rég volt, igaz sem volt talán. Az a gép 2,5 éve dolgozik már. :) De ott egészen más volt a feladat, csak a motor volt ugyanilyen.
0
Üdv!

Csak egy séma:
0
Helló! Az "enkóderes" ez a lényeg. Tehát akkor ezt a motort lehet mind két irányban hajtani, és akár egy ponton megállítani, és megtartani.A pontos fázis , és fordulatszám tartás a terheléstől függetlensége miatt az enkóder mind2 fázisjele(gondolom ez egy inkrement enkóder) kell,+ egy áramváltó visszacsatolás.Ezt kontroller nélkül nem tudod megoldani.És egy H-bridge elrendezésű végfok kell hozzá.Vagy ha csak egy sima jeladónak használod az enkódert akkor is minimum egy jól megtervezett PLL kell hozzá.Ipari igényeket mint pl. a pontos fordulatszám tartás,esetleg fézistartás,változó terhelés mellett szerintem hobby szinten, pár egyszerű alkatrésszel nem megvalósítható.
0
Na nehogy már ne lehessen mikrokontoller nélkül megépíteni házilag egy frekvenciajeladóval visszacsatolt sebességszabályzást... A kismagnókban 3-4 tranzisztorból összeütötték a nyolcvanas években...
0
Szervusz Multi Multiplikátó!
Elég volt hozzá egy TDA1059 vagy egy TCA910 is. :-)
Üdv:
exGelkás
0
Többnyire. Azért voltak különleges esetek. Pl. a Philips n4504-ben a capstan lendkereket egy sima kis DC motor hajtja, és elektronikus sebességváltás van, ugyanazzal a szíjáttétellel forgatja 19-eshez is, 9,5-hez is, 4,77-hez is. Vagyis a legkisebb sebességhez negyedére leszabályozva teker a motor. Na ott már nem úszták meg hollandusok a tachogenerátoros visszacsatolást, a nélkül talán meg sem tudna indulni.
De azért a jobb kazettásokban is volt tachos motor. Pl. a drágább Grundigokban, de némely japán típusban is...
0
Ja, hogy te nem is PWM-ben gondolkodsz.Hát ez esetben sok sikert.
0
De, PWM-ben gondolkozok. De kvára nem az a probléma lényege, hogy disszipatíve vagy PWM-mel történeik-e a teljesítményszabályozás.
0
Helló
RT8720 vagy RT8725 ami alkalmas lehet persze ha tudsz szerezni.
Vagy SN28654
Vagy NE544N,talán ez a legjobb
0
Az SN egy modell távirányító szervó kontroller, az csak egy bizonyos pozicióba tekeri a szervot
Az NE544-ről azt írja a linken, hogy max 120Hz-es PWM-mel működött neki az a kapcsolás, és olyan hangja volt, mint egy ütvefúrónak.
Ezek az RT-k használhatónak tűnnek... majd még utána olvasok meg nézek...
0
szia: ott nem volt változó terhelés
Bálint
0
Dehogynem, pont azért volt benne az encoder. Ha nem lett volna, akkor egy áteresztő stab is elég lett volna.
0
Szia!
SG3524-el csinálnám a szabályzást, az LM2917-nek elégnek kellene lenni, de ha ugrál, oszcillál, akkor túl nagy a reakciód az eltérésre.
Üdv: Jácint
0
Szia!
Nem látom az f-U kapcsolást amiről írsz, de akkor szokott egy szabályozó kör gerjedni (rángatni) ha túl nagy a hurokerősítés. Próbálj csökkenteni rajta.
Egy korrekt megoldás, ha PLL-el fogod össze a jeladó PWM jelét egy külső leosztott kvarc oszcillátor jelével és a PLL hibajelével vezérelsz egy PWM generátort. Persze nem tudom, hogy mennyire akarod túlbonyolítani.
Üdv.
0
Ehh, így elsőre én egy mikrokontrollert javasolnék, nem bajlódnék analóg cuccokkal.
Pl. egy sima Atmega168 megfelelhet a célra, vagy valamilyen PIC. Lehetőség szerint 16 bites PWM kimenetes.
Az egyik 16 bites timer-t úgy kell beállítani, hogy a szükséges fordulatszám-tartományban, a processzor órajel megfelelő leosztásában a fordulatszámmal arányos értéket adjon.
A másik timer pedig az Output Compare regiszteren keresztül PWM jelet állítson elő.
A kettő között tetszőleges matematikai algoritmus beépíthető. A szükséges fordulatszám akár soros porton, akár egy ADC lábat felhasználva, potméterrel beadható.
Az enkódert direktben rá lehet kötni egy felhúzó ellenállással a proci egy lábára, a motort pedig egy megfelelő terhelhetőségű tranzisztorral lehet szabályozni. Pl. IRF540 elég combos, a gate-je közvetlenül mehet a proci PWM kimenetére. Ha irányváltás is kell, akkor H-kapcsolású híd és 4db FET szükséges, de ahogy kiveszem, itt csak a fordulatszám tartása a cél.
Ügyes programozással, ha az enkóder jelre egy megszakítást teszünk, akkor akár pontos pozicionálás is elérhető.
Az ATMEGA procikhoz nagyon felhasználóbarát fordító az Arduino.
Egy példa a motorvezérlésre: https://www.youtube.com/watch?v=XIUrnR8bLAI
0
Az egy egyszerű dum-dum, teljes gázzal megy a motor, amíg el nem éri a kíváns sebességet, majf teljesen kikapcsol. Tehát helyes a diagnózisod. Az úgy nem jó.
Ilyen PLL kapcsolással pár éve kísérleteztem már, de ott is valami gond volt a charge pump rc tagjával, végülis csak a fázisszinkront sikerült megoldani vele, azt se tökéletesen.
Amúgy nem vagyok a bonyolításnak ellenére, de a most konkrétan egy bevált kapcsolási rajzra vágyok. Fejlesztési elképzeléseim nekem is vannak, de ha nem muszáj, nem szeretnék heteket elcseszni a spanyol viasz kifejlesztésére. :-(
0
Szia!
A szabályzás meredekségét kell eltalálni. Vagyis hogy 1% sebességeltérésre hány %-kal változzon a PWM. Ha belengett, meg oszcillált, akkor túl nagy volt a változás.
Üdv: Jácint
0
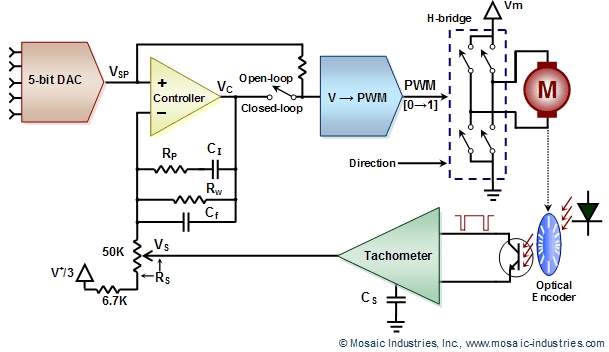
Ja, ja, az eméletről már találtam:
http://www.mosaic-industries.com/embedded-systems/instrumentation/motor-...
0